Cross building
Cross building (or cross compilation) is the process of generating binaries for a platform that is not the one where the compiling process is running.
Cross compilation is mostly used to build software for an alien device, such as an embedded device where you don’t have an operating system nor a compiler available. It’s also used to build software for slower devices, like an Android machine or a Raspberry Pi where running the native compilation will take too much time.
In order to cross build a codebase the right toolchain is needed, with a proper compiler (cross compiler), a linker
and the set of libraries matching the host platform.
GNU triplet convention
According to the GNU convention, there are three platforms involved in the software building:
Build platform: The platform on which the compilation tools are being executed.
Host platform: The platform on which the generated binaries will run.
Target platform: Only when building a cross compiler, it is the platform it will generate binaries for.
Depending on the values of these platforms, there are different scenarios:
Native building: when the
buildand thehostplatforms are the same, it means that the platform where the compiler is running is the same one where the generated binaries will run. This is the most common scenario.Cross building: when the
buildand thehostplatform are different, it requires a cross compiler running in the build platform that generates binaries for the host platform.
The target platform plays and important role when compiling a cross compiler, in that scenario
the target is the platform the compiler will generate binaries for: in order to be a cross compiler
the host platform (where the cross compiler will run) has to be different from the target platform.
If the build platform is also different, it is called Canadian Cross.
Let’s illustrate these scenarios with some examples:
The Android NDK is a cross compiler to Android: it can be executed in Linux (the
buildplatform) to generate binaries for Android (thehostplatform).The Android NDK was once compiled, during that compilation a different compiler was used running in a
buildplatform (maybe Windows) to generate the actual Android NDK that will run in thehostplatform Linux, and as we saw before, that Android NDK cross compiler will generate binaries for atargetplatform which is Android.
The values of the build, host and target platforms are not absolute, and
they depend on the process we are talking about. The host when compiling a cross compiler turns
into the build when using that same cross compiler, or the target of the cross compiler is
the host platform of the binaries generated with it.
See also
One way to avoid this complexity is to run the compilation in the host platform, so both build and
host will take the same value and it will be a native compilation. Docker is a very successful
tool that can help you with this, read more about it in this section.
Cross building with Conan
If you want to cross build a Conan package (for example using your Linux machine) to build the zlib
Conan package for Windows, you need to tell Conan where to find your toolchain/cross compiler.
There are two approaches:
Install the toolchain in your computer and use a
profileto declare the settings and point to the needed tools/libraries in the toolchain using the[env]section to declare, at least, theCCandCXXenvironment variables.Package the toolchain as a Conan package and include it as a
build_requires.
Using a profile
Using a Conan profile we can declare not only the settings that will identify our binary, but also
all the environment variables needed to use a toolchain or cross compiler. The profile needs the following
sections:
A [settings] section containing the regular settings:
os,arch,compilerandbuild_typedepending on your library. These settings will identify your binary.An [env] section with a PATH variable pointing to your installed toolchain. Also any other variable that the toolchain expects (read the docs of your compiler). Some build systems need a variable
SYSROOTto locate where the host system libraries and tools are.
For example, in the following profile we declare the host platform to be Windows x86_64 with the
compiler, version and other settings be are using. And we add the [env] section with all the variables
needed to use an installed toolchain:
toolchain=/usr/x86_64-w64-mingw32 # Adjust this path
target_host=x86_64-w64-mingw32
cc_compiler=gcc
cxx_compiler=g++
[env]
CONAN_CMAKE_FIND_ROOT_PATH=$toolchain
CHOST=$target_host
AR=$target_host-ar
AS=$target_host-as
RANLIB=$target_host-ranlib
CC=$target_host-$cc_compiler
CXX=$target_host-$cxx_compiler
STRIP=$target_host-strip
RC=$target_host-windres
[settings]
# We are cross-building to Windows
os=Windows
arch=x86_64
compiler=gcc
# Adjust to the gcc version of your MinGW package
compiler.version=7.3
compiler.libcxx=libstdc++11
build_type=Release
You can find working examples at the bottom of this section.
Using build requires
Instead of manually downloading the toolchain and creating a profile, you can create a Conan package
with it. Starting with Conan v1.24 and the command line arguments --profile:host and --profile:build
this should be a regular recipe, for older versions some more work is needed.
Conan v1.24 and newer
A recipe with a toolchain is like any other recipe with a binary executable:
import os
from conans import ConanFile
class MyToolchainXXXConan(ConanFile):
name = "my_toolchain"
version = "0.1"
settings = "os", "arch", "compiler", "build_type"
# Implement source() and build() as usual
def package(self):
# Copy all the required files for your toolchain
self.copy("*", dst="", src="toolchain")
def package_info(self):
bin_folder = os.path.join(self.package_folder, "bin")
self.env_info.CC = os.path.join(bin_folder, "mycompiler-cc")
self.env_info.CXX = os.path.join(bin_folder, "mycompiler-cxx")
self.env_info.SYSROOT = self.package_folder
The Conan package with the toolchain needs to fill the env_info object
in the package_info() method with the same variables we’ve specified in the examples
above in the [env] section of profiles.
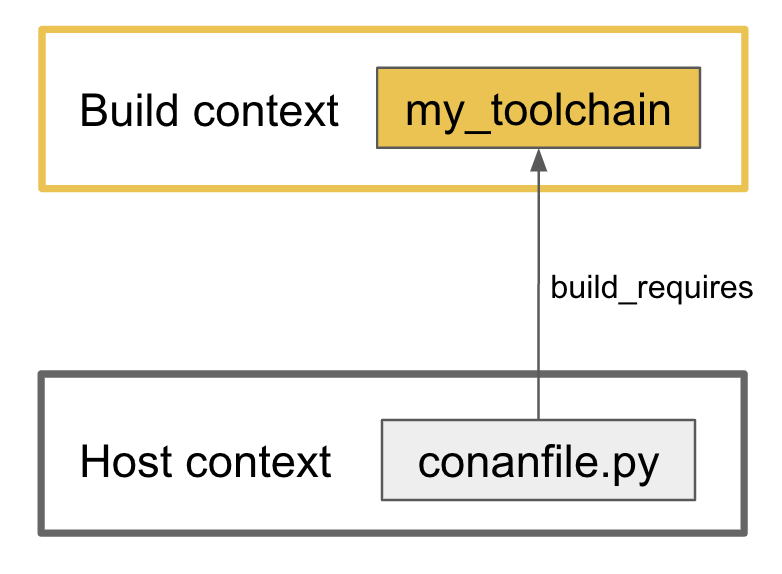
Then you will need to consume this recipe as any regular build requires that belongs to the
build context: you need to use the --profile:build argument in the command line while creating your library:
conan create path/to/conanfile.py --profile:build=profile_build --profile:host=profile_host
The profile profile_build will contain just the settings related to your build platform, where you are
running the command, and the profile_host will list the settings for the host platform (and eventually
the my_toolchain/0.1 as build_requires if it is not listed in the recipe itself).
Conan will apply the appropiate profile to each recipe, and will inject the environment of all the build requirements
that belong to the build context before running the build() method of the libraries being compiled.
That way, the environment variables CC, CXX and SYSROOT from my_toolchain/0.1 will be available
and also the path to the bindirs directory from that package.
The above means that Conan is able to compile the full graph in a single execution, it will compile
the build requires using the profile_build and then it will compile the libraries using the host_profile
settings applying the environment of the former ones.
Conan older than v1.24
Warning
We ask you to use the previous approach for Conan 1.24 and newer, and avoid any specific modification of your recipes to make them work as build requirements in a cross building scenario.
With this approach, only one profile is provided in the command line (the --profile:host or just --profile)
and it has to define the os_build and arch_build settings too. The recipe of this build requires
has to be modified to take into account these settings and the compiler and
build_type settings have to be removed because their values for the build platform are not defined
in the profile:
from conans import ConanFile
import os
class MyToolchainXXXConan(ConanFile):
name = "my_toolchain"
version = "0.1"
settings = "os_build", "arch_build"
# As typically, this recipe doesn't declare 'compiler' and 'build_type',
# the source() and build() methods need a custom implementation
def build(self):
# Typically download the toolchain for the 'build' platform
url = "http://fake_url.com/installers/%s/%s/toolchain.tgz" % (os_build, os_arch)
tools.download(url, "toolchain.tgz")
tools.unzip("toolchain.tgz")
def package(self):
# Copy all the required files for your toolchain
self.copy("*", dst="", src="toolchain")
def package_info(self):
bin_folder = os.path.join(self.package_folder, "bin")
self.env_info.PATH.append(bin_folder)
self.env_info.CC = os.path.join(bin_folder, "mycompiler-cc")
self.env_info.CXX = os.path.join(bin_folder, "mycompiler-cxx")
self.env_info.SYSROOT = self.package_folder
With this approach we also need to add the path to the binaries to the PATH environment variable. The
one and only profile has to include a [build_requires] section with the reference to our new packaged toolchain and
it will also contain a [settings] section with the regular settings plus the os_build and arch_build ones.
This approach requires a special profile, and it needs a modified recipe without the compiler and build_type settings,
Conan can still compile it from sources but it won’t be able to identify the binary properly and it can be really to tackle
if the build requirements has other Conan dependencies.
Settings *_build and *_target
Warning
These settings are being reviewed and might be deprecated in the future, we encourage you to try not to use them. If you need help with your use case, please open an issue in the Conan repository and we will help you.
Before Conan v1.24 the recommended way to deal with cross building was to use some extra settings like
os_build, arch_build and os_target and arch_target. These settings have a special meaning
for some Conan tools and build helpers, but they also need to be listed in the recipes themselves creating
a dedicated set of recipes for installers and tools in general. This approach should be superseeded with
the introduction in Conan 1.24 of the command line arguments --profile:host and --profile:build
that allow to declare two different profiles with all the information needed for the corresponding platforms.
The meaning of those settings is the following:
The settings
os_buildandarch_buildidentify thebuildplatform according to the GNU convention triplet. These settings are detected the first time you run Conan with the same values than thehostsettings, so by default, we are doing native building. You will probably never need to change the value of this setting because they describe where are you running Conan.The settings
os_targetandarch_targetidentify thetargetplatform. If you are building a cross compiler, these settings specify where the compiled code will run.
The rest of settings, as we already know, identify the host platform.
Preparing recipes to be cross-compiled
If you use the build helpers AutoToolsBuildEnvironment or CMake
together with os_build and arch_build settings, Conan will adjust the configuration accordingly to the specified settings.
If not, you can always check the regular settings os, arch,… (matching the host platform) and
inject the needed flags to your build system script.
Also, you can use this tool to check if you are cross-building:
tools.cross_building(self.settings) (returns True or False)
Note
In the following releases, this build helpers and tools will take into account the values of the
command line arguments --profile:host and --profile:build to implement the proper
cross building behavior.
ARM architecture reference
Remember that the Conan settings are intended to unify the different names for operating systems, compilers, architectures etc.
Conan has different architecture settings for ARM: armv6, armv7, armv7hf, armv8.
The “problem” with ARM architecture is that it’s frequently named in different ways, so maybe you are wondering what setting
do you need to specify in your case.
Here is a table with some typical ARM platforms:
Platform |
Conan setting |
|---|---|
Raspberry PI 1 |
|
Raspberry PI 2 |
|
Raspberry PI 3 |
|
Visual Studio |
|
Android armbeabi-v7a |
|
Android armv64-v8a |
|
Android armeabi |
|
Examples
Examples using profiles
Linux to Windows
Install the needed toolchain, in Ubuntu:
sudo apt-get install g++-mingw-w64 gcc-mingw-w64
Create a file named linux_to_win64 with the contents:
toolchain=/usr/x86_64-w64-mingw32 # Adjust this path target_host=x86_64-w64-mingw32 cc_compiler=gcc cxx_compiler=g++ [env] CONAN_CMAKE_FIND_ROOT_PATH=$toolchain CHOST=$target_host AR=$target_host-ar AS=$target_host-as RANLIB=$target_host-ranlib CC=$target_host-$cc_compiler CXX=$target_host-$cxx_compiler STRIP=$target_host-strip RC=$target_host-windres [settings] # We are cross-building to Windows os=Windows arch=x86_64 compiler=gcc # Adjust to the gcc version of your MinGW package compiler.version=7.3 compiler.libcxx=libstdc++11 build_type=Release
Clone an example recipe or use your own recipe:
git clone https://github.com/memsharded/conan-hello.git
Call conan create using the created linux_to_win64
$ cd conan-hello && conan create . conan/testing --profile ../linux_to_win64 ... [ 50%] Building CXX object CMakeFiles/example.dir/example.cpp.obj [100%] Linking CXX executable bin/example.exe [100%] Built target example
A bin/example.exe for Win64 platform has been built.
Windows to Raspberry Pi (Linux/ARM)
Install the toolchain: https://gnutoolchains.com/raspberry/ You can choose different versions of the GCC cross compiler. Choose one and adjust the following settings in the profile accordingly.
Create a file named win_to_rpi with the contents:
target_host=arm-linux-gnueabihf standalone_toolchain=C:/sysgcc/raspberry cc_compiler=gcc cxx_compiler=g++ [settings] os=Linux arch=armv7 # Change to armv6 if you are using Raspberry 1 compiler=gcc compiler.version=6 compiler.libcxx=libstdc++11 build_type=Release [env] CONAN_CMAKE_FIND_ROOT_PATH=$standalone_toolchain/$target_host/sysroot PATH=[$standalone_toolchain/bin] CHOST=$target_host AR=$target_host-ar AS=$target_host-as RANLIB=$target_host-ranlib LD=$target_host-ld STRIP=$target_host-strip CC=$target_host-$cc_compiler CXX=$target_host-$cxx_compiler CXXFLAGS=-I"$standalone_toolchain/$target_host/lib/include"
The profiles to target Linux are all very similar. You probably just need to adjust the variables declared at the top of the profile:
target_host: All the executables in the toolchain starts with this prefix.
standalone_toolchain: Path to the toolchain installation.
cc_compiler/cxx_compiler: In this case
gcc/g++, but could beclang/clang++.
Clone an example recipe or use your own recipe:
git clone https://github.com/memsharded/conan-hello.git
Call conan create using the created profile.
$ cd conan-hello && conan create . conan/testing --profile=../win_to_rpi ... [ 50%] Building CXX object CMakeFiles/example.dir/example.cpp.obj [100%] Linking CXX executable bin/example [100%] Built target example
A bin/example for Raspberry PI (Linux/armv7hf) platform has been built.
Windows to Windows CE
The Windows CE (WinCE) operating system is supported for CMake and MSBuild. Since WinCE depends on the MSVC compiler, Visual Studio and the according Windows CE platform SDK for the WinCE device have to be installed on the build host.
The os.platform defines the WinCE Platform SDK and is equal to the Platform in Visual Studio.
Some examples for Windows CE platforms:
SDK_AM335X_SK_WEC2013_V310STANDARDSDK_500 (ARMV4I)Windows Mobile 5.0 Pocket PC SDK (ARMV4I)Toradex_CE800 (ARMV7)
The os.version defines the WinCE version and must be "5.0", "6.0" or "7.0".
CMake supports Visual Studio 2008 (compiler.version=9) and Visual Studio 2012 (compiler.version=11).
Example of an Windows CE conan profile:
[settings]
os=WindowsCE
os.version=8.0
os.platform=Toradex_CE800 (ARMV7)
arch=armv7
compiler=Visual Studio
compiler.version=11
# Release configuration
build_type=Release
compiler.runtime=MD
Note
Further information about CMake and WinCE can be found in the CMake documentation:
Linux/Windows/macOS to Android
Cross-building a library for Android is very similar to the previous examples, except the complexity of managing different architectures (armeabi, armeabi-v7a, x86, arm64-v8a) and the Android API levels.
Download the Android NDK here and unzip it.
Note
If you are in Windows the process will be almost the same, but unzip the file in the root folder of your hard disk (C:\) to avoid issues with path lengths.
Now you have to build a standalone toolchain.
We are going to target the “arm” architecture and the Android API level 21. Change the --install-dir to any other place that works
for you:
$ cd build/tools
$ python make_standalone_toolchain.py --arch=arm --api=21 --stl=libc++ --install-dir=/myfolder/arm_21_toolchain
Note
You can generate the standalone toolchain with several different options to target different architectures, API levels etc.
Check the Android docs: standalone toolchain
To use the clang compiler, create a profile android_21_arm_clang. Once again, the profile is very similar to the
RPI one:
standalone_toolchain=/myfolder/arm_21_toolchain # Adjust this path
target_host=arm-linux-androideabi
cc_compiler=clang
cxx_compiler=clang++
[settings]
compiler=clang
compiler.version=5.0
compiler.libcxx=libc++
os=Android
os.api_level=21
arch=armv7
build_type=Release
[env]
CONAN_CMAKE_FIND_ROOT_PATH=$standalone_toolchain/sysroot
PATH=[$standalone_toolchain/bin]
CHOST=$target_host
AR=$target_host-ar
AS=$target_host-as
RANLIB=$target_host-ranlib
CC=$target_host-$cc_compiler
CXX=$target_host-$cxx_compiler
LD=$target_host-ld
STRIP=$target_host-strip
CFLAGS= -fPIE -fPIC -I$standalone_toolchain/include/c++/4.9.x
CXXFLAGS= -fPIE -fPIC -I$standalone_toolchain/include/c++/4.9.x
LDFLAGS= -pie
You could also use gcc using this profile arm_21_toolchain_gcc, changing the cc_compiler and
cxx_compiler variables, removing -fPIE flag and, of course, changing the [settings] to
match the gcc toolchain compiler:
standalone_toolchain=/myfolder/arm_21_toolchain
target_host=arm-linux-androideabi
cc_compiler=gcc
cxx_compiler=g++
[settings]
compiler=gcc
compiler.version=4.9
compiler.libcxx=libstdc++
os=Android
os.api_level=21
arch=armv7
build_type=Release
[env]
CONAN_CMAKE_FIND_ROOT_PATH=$standalone_toolchain/sysroot
PATH=[$standalone_toolchain/bin]
CHOST=$target_host
AR=$target_host-ar
AS=$target_host-as
RANLIB=$target_host-ranlib
CC=$target_host-$cc_compiler
CXX=$target_host-$cxx_compiler
LD=$target_host-ld
STRIP=$target_host-strip
CFLAGS= -fPIC -I$standalone_toolchain/include/c++/4.9.x
CXXFLAGS= -fPIC -I$standalone_toolchain/include/c++/4.9.x
LDFLAGS=
Clone, for example, the zlib library to try to build it to Android
git clone https://github.com/conan-community/conan-zlib.git
Call conan create using the created profile.
$ cd conan-zlib && conan create . --profile=../android_21_arm_clang
...
-- Build files have been written to: /tmp/conan-zlib/test_package/build/ba0b9dbae0576b9a23ce7005180b00e4fdef1198
Scanning dependencies of target enough
[ 50%] Building C object CMakeFiles/enough.dir/enough.c.o
[100%] Linking C executable bin/enough
[100%] Built target enough
zlib/1.2.11 (test package): Running test()
A bin/enough for Android ARM platform has been built.
Examples using build requires
Example: Darwin Toolchain
Check the Darwin Toolchain package in conan-center.
You can use a profile like the following to cross-build your packages for iOS, watchOS and tvOS:
include(default)
[settings]
os=iOS
os.version=9.0
arch=armv7
[build_requires]
darwin-toolchain/1.0@theodelrieu/stable
$ conan install . --profile ios_profile
See also
Check the Creating conan packages to install dev tools to learn more about how to create Conan packages for tools.
Check the mingw-installer build require recipe as an example of packaging a compiler.
—
See also
Reference links
ARM
ANDROID
VISUAL STUDIO
See also
See conan.conf file and Environment variables sections to know more.
See AutoToolsBuildEnvironment build helper reference.
See CMake build helper reference.
See CMake cross-building wiki to know more about cross-building with CMake.